RoverTito
Access open our source repository
All the design information is available in an open repository.

Access open our source repository
All the design information is available in an open repository.

Our first Moon rover
The rover is compact, and its surface is comparable to that of an A4 sheet of paper.
Inside, you’ll find a battery, electronics boards and the necessary engines for the mission.
It features 6 sets of flight heritage engines plus planetary gearboxes that will drive its wheels,
specially designed to navigate harsh and unknown terrains.
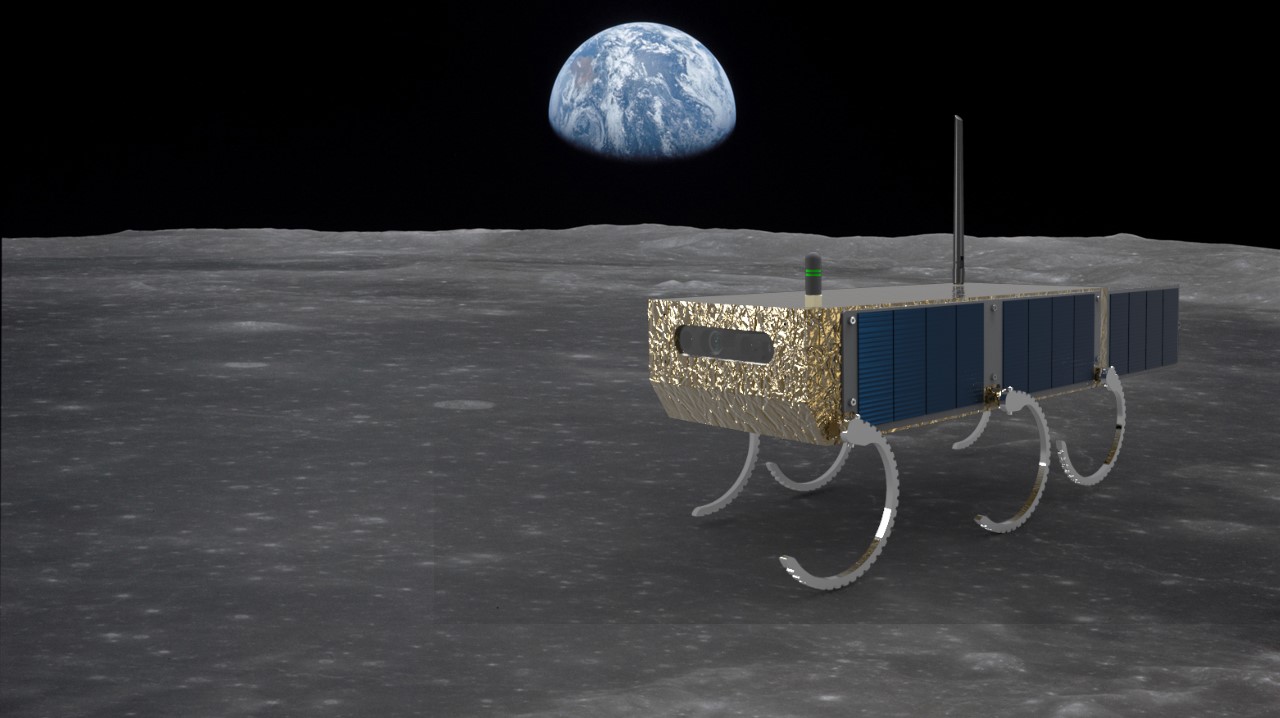
It survives lunar eclipses!
Thanks to the latest advancements of materials engineering, we can currently choose to have high-efficiency solar panel modules with negligible weight, which guarantee all the necessary energy to move our mechatronic system. They are located on the side, since our first mission will be carried out in the Poles where solar incidence is almost parallel. Another decisive factor in our design are the batteries,which determine the success of our mission. We opted for centralized energy storage, since it provides regulated voltage outputs for our control and power requirements, as well as enough energy density to keep our CPU in a controlled atmosphere while it performs data logging during 12 operating hours.
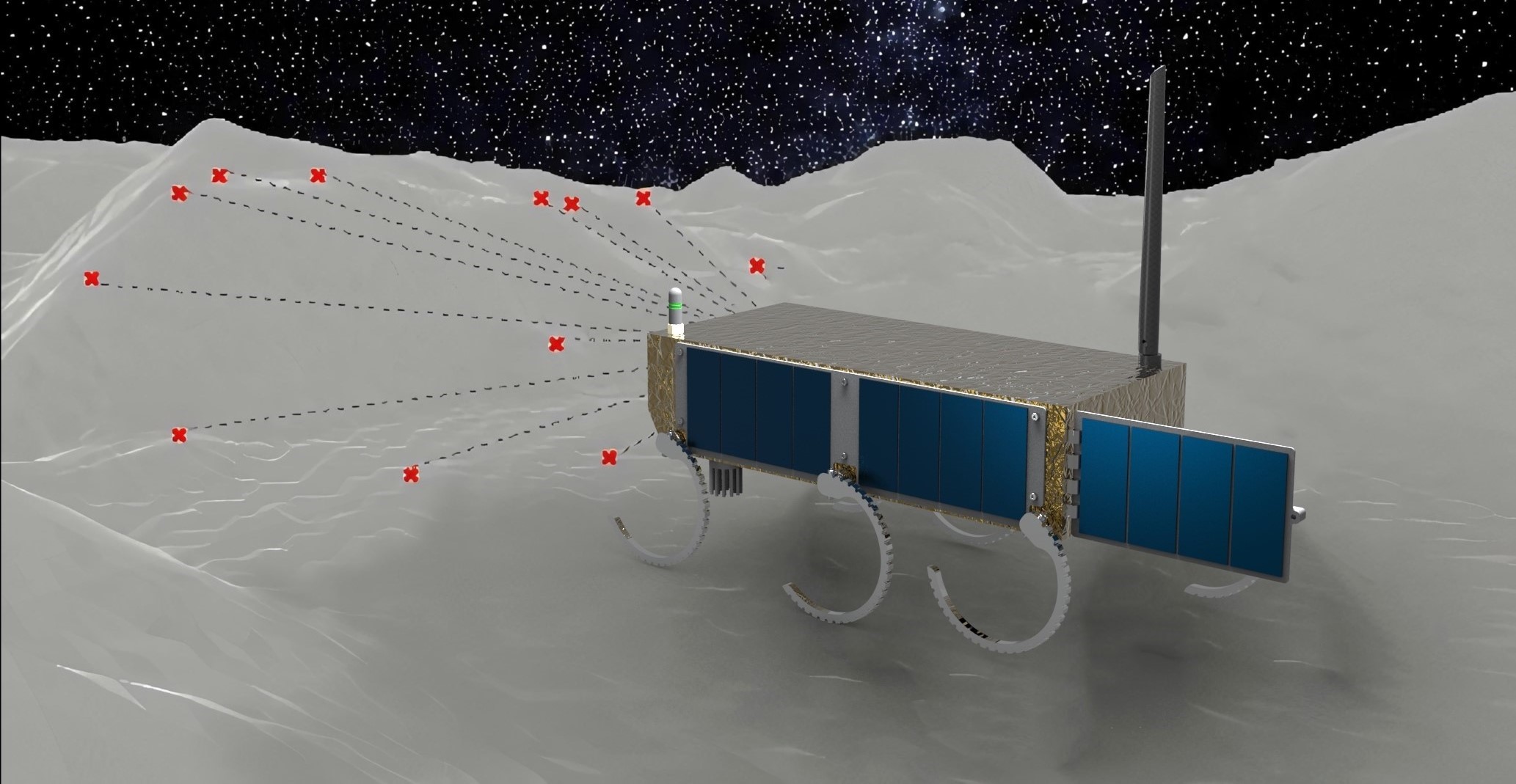
How does our rover manage to simultaneously move and locate itself without teleoperation?
Among the wide range of autonomous robot navigation algorithms, we are using a strategy based on
Visual SLAM. Our system is composed of a main stereo camera through which we can detect relevant
"features" of the environment and perform a highly accurate localization and mapping of the lunar landscape.
The correct use of SLAM and planning algorithms will allow our rover to make autonomous decisions and decide where to
move, while considering parameters such as obstacles, valleys and craters.
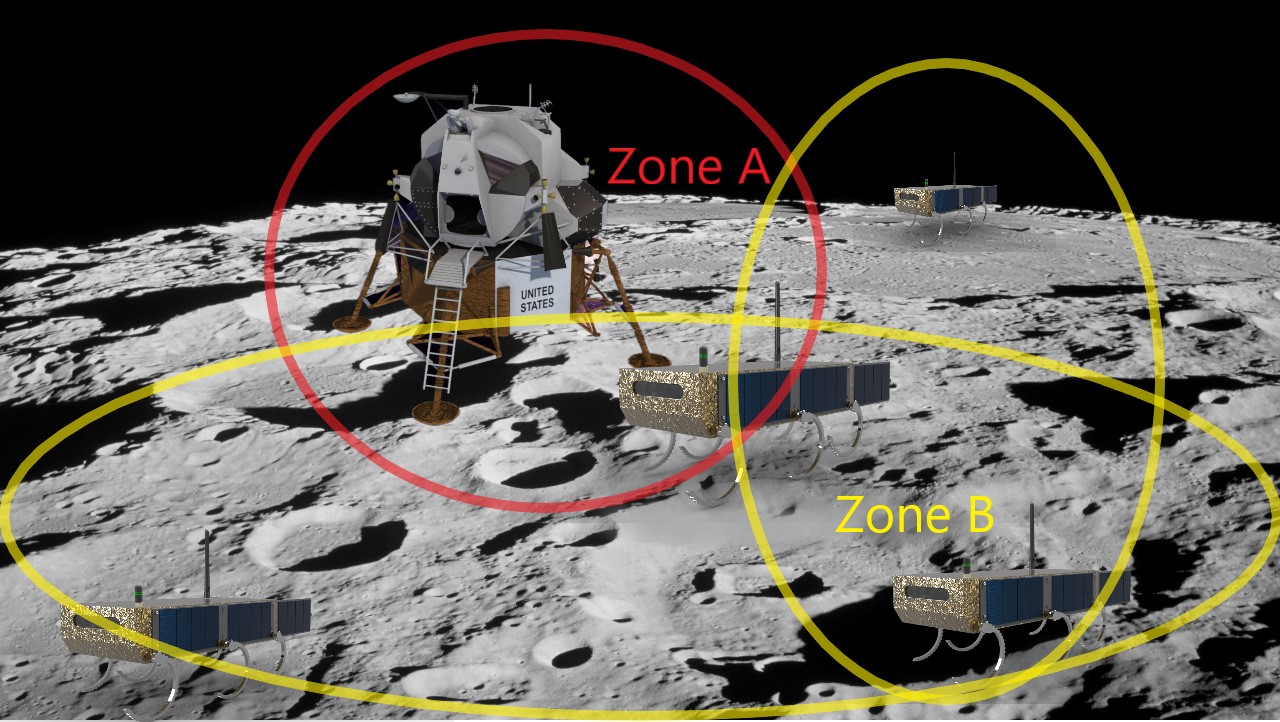
Wi-Fi in space!
The rover has three communication systems. The first is RS-422. It is used to check the "health status" of the rover before the mission begins. The second is IEEE 802.11n (Wi-Fi 4), which is used to communicate with the lander and other rovers at a high speed (zone A - 500 m) and download all the collected information (geological and images). The third is LoRa, which allows rovers to communicate with each other within a 32 km radius (zone B), receive commands and also transfer collected information until the one closer to the lander can download this information. In that way, the analysis area can be expanded.
How is our rover controlled?
The brain of the rover is a microcontroller of the SAMV71 family that controls different subsystems. To bring out the processing required for Visual SLAM, we have a SBC (Single Board Computer), where the SLAM navigation libraries will be running. To achieve an easy implementation of the rover we will be using COTS (Commercial Of The Shelf) products and open source libraries in order to reduce development and evaluation times and costs. We’ll be avoiding the use of rad-tolerant and rad-hardened components whenever possible, except for the ones developing a critical mission.To achieve a good reliability, the rover will have redundant components that would start working if a component happens to fail.